Object detection
1. Object detection
1.1 what is object detection?
image 인식 분류의 기초

Semantic segmentation와 imstance segmentation, panoptic segmentation 의 차이점은 같은 클래스라도 객체가 다르다면 구분이 가능한지 아닌지의 여부이다.

Object detection 은 Classification 과 Box localization 을 동시에 추정하는 문제.
1.2 What are the applications of object detection?


그림과 같이 자율주행에 이용되기도 한다.


Optical Character Recognition 에서도 복잡한 배경 속에서 글자를 인식하여 위치를 특정해야 하기 때문에, object detection이 필요하다.
2. Two-stage detector (Regional proposal과 Classification이 순차적으로 진행)

Neural network 이전의 object detection 을 해결하기 위한 과정들.
Selective search

다양한 물체들에 대해서 Bounding box 를 제한을 해준다.
영상을 비슷한 색끼리 잘게 분할한 후(Over-segmentation) 분할된 영역들을 비슷한(색깔이나 gradient의 유사성) 영역끼리 반복해서 합쳐준다.
이를 반복하면 큰 segmentation 이 만들어지고, 이를 포함하는 Bounding box를 설정해 물체의 후보군으로 사용한다.

기존 Object detection 의 단점
- 기존에는 sliding window 방식으로, 물체가 있을만 한 곳을 하나씩 탐색하여 물체를 탐색했다. Sliding window 방식은 크기가 고정되지 않아 여러 크기로도 순차적으로 계산해야 하기 때문에 경우의 수가 폭발적으로 증가하여 이를 분류하기 위해서는 연산량이 많아지고 연산시간이 오래걸려 비효율적이다.
2.1 R-CNN

첫 deep learning 기반 object detection
R-CNN은 기존 object detection의 단점을 보완하고자 Region Proposal 이라는 방식을 제안한다.
Selective search를 활용해 물체가 있을 법한 장소를 2000개 탐색하고, 이에 대해서 분류를 진행한다.
위 논문에서는 물체가 있을법한 장소를 추출한 뒤, 크기에 상관없이 227x227로 이미지를 압축한다.
그리고 이렇게 모인 이미지를 CNN을 거쳐 feature vector를 계산하고 Linear SVM을 통해 object를 분류하게 된다.

2.2 Fast R-CNN
이전 R-CNN 의 문제점
1. 학습이 multi-stage pipline으로 이루어진다.
2. 학습에서 경제성이 떨어진다.
3. object detection이 느리다.
이러한 문제를 해결하기 위한 Fast R-CNN 의 출현
Fest R-CNN 모델 구조
1. input image와 multiple regions of interest(ROI = 이미지상 내가 관심있어하는 일부 영역)가 입력으로 사용된다.
2. 각각의 ROI는 ConvNet 연산을 통해 고정된 크기의 ROI에 해당하는 feature map 으로 pooling되고,
FC layers 를 통해 feture vector로 맵핑된다.
3. ROI 별 두개의 output을 가지고, 더 정밀한 bounding box 를 추정하기 위해
bounding box regressor과 softmax 를 통한 classification 을 수행한다.  - ROI Pooling layer
- ROI Pooling layer
2.3 Faster R-CNN

IOU = (두 영역의 교집합 / 두 영역의 합집합)
Anchor boxes

- 직관적으로 설명하자면, 동일한 크기의 sliding window를 이동시키며 window의 위치를 중심으로 사전에 정의된 다양한 비율/크기의 anchor box들을 적용하여 feature를 추출하는 것이다. 이는 image/feature pyramids처럼 image 크기를 조정할 필요가 없으며, multiple-scaled sliding window처럼 filter 크기를 변경할 필요도 없으므로 계산효율이 높은 방식이라 할 수 있다. 논문에서는 3가지 크기와 3가지 비율의, 총 9개의 anchor box들을 사용하였다. positive 한 box 들과 negative 한 box 들의 loss를 줘서 학습하도록 유도한다.

core contribution = RPN(Region Proposal Network)

RPN 의 구조
- feature map 관점에서 fully convolution 하게 sliding window 방식으로 이동하며 매 위치마다 k 개의 anchor box를 고려한다.
각 위치에서 256 dimension 의 feature map 을 추출하고 여기서 2k 개의 classification score 를 출력한다.
그리고 4k 개의 정교한 bounding box를 만들기 위한 regression output 을 출력한다.NMS (Non Maximum Suppression)
- 동일한 클래스에 대해 높은-낮은 confidence 순서로 정렬한다.
- 가장 confidence가 높은 boundingbox와 IOU가 일정 이상인 boundingbox는 동일한 물체를 detect했다고 판단하여 지운다.


R-CNN Famaily

3. Single-stage detector (Region Proposal과 Detection 를 한번에 수행)
One-stage vs tow-stage

- Single-stage detection 은 정확도를 조금 포기하더라도 속도를 확보해 real-time detection 을 가능하도록 설계하는 것에 목적을 둠.
3.1 You only look once (YOLO)

input 이미지를 SxS grid로 나눈 후, 각 grid 에 대해서 b 개의 bounding box(4개의 좌표)와 bounding box의 confidence score 를 갖는다. (*confidence score 란 박스가 객체를 보유하고 있다고 생각하는 모델의 신뢰도와 예측하는 박스의 정확도를 반영한다.)
각 위치마다 Class probability map

최종 결과로 NMS 알고리즘을 통해 전개된 bounding box 만을 출력한다. (bounding box 구성 : x, y, w, h, confidence)

YOLO 구조

3.2 Single Shot MultiBox Detector (SSD)
YOLO 는 마지막 layer에서 1번만 prediction 을 하기 때문에 localization 정확도가 떨어지는 결과를 나타냈다. 이를 보완하기 위해 SSD가 나왔다. SSD는 Multi-scale object를 더 잘 처리하기 위해서 중간 feature map을 각 해상도에 적절한 bounding box 들을 출력할 수 있도록 multi-scale 구조를 만들었다.

SSD 구조

4. Two-stage detector vs. one-stage detector
4.1 Focal Loss

single-stage 방법들은 ROI pooling이 없다보니 모든 영역에서의 Loss가 계산이 되고, 일정 gradient 가 발생한다. 따라서 유용하지 않은 영역에서 오는 정보들로 Class imbalance 문제를 가지고 있다.
이러한 Class imbalance 해결하기 위한 방법으로 Focal Loss 가 제안되었다.
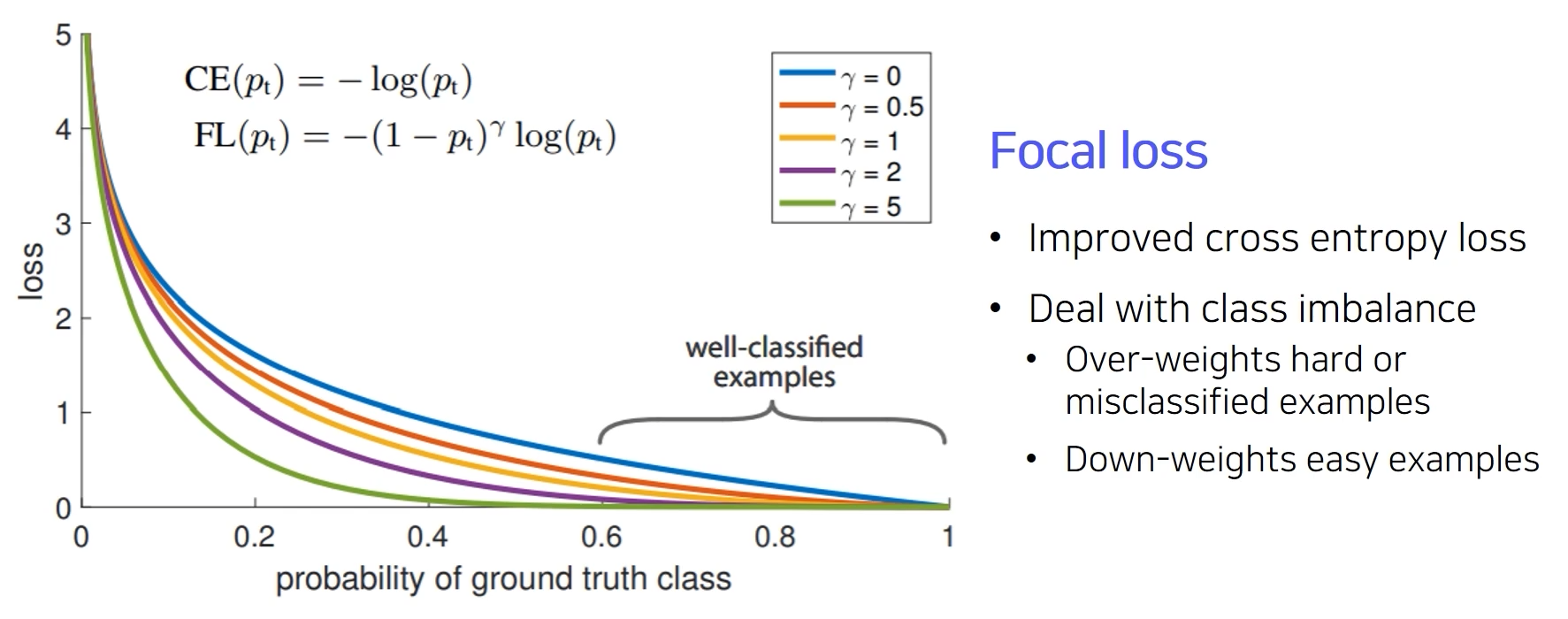
Focal loss는 분류 에러에 근거한 loss에 가중치를 부여하는데, 샘플이 CNN에 의해 이미 올바르게 분류되었다면 그것에 대한 가중치는 감소한다. 즉, 좀 더 문제가 있는 loss에 더 집중하는 방식으로 불균형한 클래스 문제를 해결했다. Focal loss는 Sigmoid activation을 사용하기 때문에, Binary Cross-Entropy loss라고도 할 수 있다. 특별히, $r$ = 0 일때 Focal loss는 Binary Cross Entropy Loss와 동일하다. (정답에 대한 gradient 보다 오답에 대한 gradient 를 중점으로 두고, 기울기에 대해 생각해볼 것 -> $r$ 이 클때 오답에 대한 Loss 의 기울기가 더 크다.)
4.2 RetinaNet

Low level 특징과 high level 특징을 둘다 잘 활용하면서도 각 scale 별로 물체를 잘 찾기 위한 Multi-scale 구조를 갖기 위해 이렇게 생겼음.
5. Detection with Transformer
DETR


DETR 은 Transformer 를 object detection 에 적용한 사례이다. 기본적인 CNN 의 feature 와 각 위치의 multi-dimension 으로 표현한 encoding을 쌍으로 해서 input token 을 만들어준다. 이렇게 encoding 이 된 후 transformer encoder 를 거치게 되고, 정리된 특징들을 decoder 에 넣어준다. 이후 object queries 를 활용하여 token 이 나타내는 object 가 무엇인지에 대한 질의를 한다. 이후 token 의 위치 정보를 파싱해서 결과값이 출력된다.

'네이버 부스트캠프 AI Tech' 카테고리의 다른 글
| 부스트캠프 AI Tech 2기 CV - Conditional Generative Model (0) | 2022.04.05 |
|---|---|
| 부스트캠프 AI Tech 2기 CV - panoptic segmenation and landmark localization (0) | 2022.04.05 |
| 부스트캠프 AI Tech 2기 CV - Segmentation Overview (0) | 2022.04.05 |
| 부스트캠프 AI Tech 2기 CV - Data augmentation (0) | 2022.04.05 |
| 부스트캠프 AI Tech 2기 - FaceNet (0) | 2022.04.05 |